机器人的导航规划主要分为三部分:
-
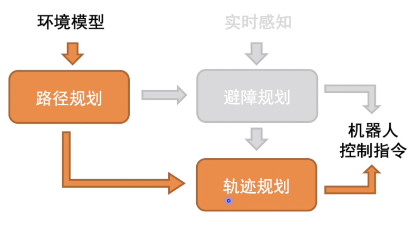
路径规划:根据给定的地图和目标位置,规划一条使机器人到达目标位置的路径(只考虑工作空间的几何约束,不考虑机器人的运动学模型和约束)
-
避障规划:根据传感器的实时测量信息,调整路径/轨迹以避免发生碰撞
-
轨迹规划:根据机器人运动学模型和约束,确定机器人的控制指令,将可行路径转换为可行轨迹
他们之间的关系示意如下:
路径规划
不考虑机器人运动学模型和约束,将机器人抽象为空间中的点
基本概念
- 工作空间:机器人采用位姿描述,并考虑体积,机器人能达到的空间位置集合
- 位形空间(Configuration Space):不考虑姿态、体积和非完整运动学约束,机器人成为一个可移动点
- 障碍物按照机器人半径进行膨胀,可将工作空间转为位形空间
- 常转换为拓扑连通图和最优路径搜索问题
拓扑连通图的构建
- 基本思路:对空间作离散化
- 分辨率完备resolution completeness:解析性离散化,确保获得可行解
- 行车图法:基于障碍物集合形状分解姿态空间
- 单元分解法:区分空闲单元和被占单元
- 势场法:根据障碍物和目标对空间各点施加虚拟力
- 概率完备Probabilistic completeness:
基于概率进行随机采样离散化,使获得解的概率趋近于1
- PRM(Probabilistic RoadMaps)
- RRT(Rapid-Exploring Radom Trees)
最优路径搜索
- 精确最优搜索:深度优先法、宽度优先法 耗时较大
- 近似最优搜索:
- 启发式搜索:$A$,$D$
- 准启发式搜索:退火、进化、蚁群优化等