行车图法
1.基本思想
- 基于障碍物的几何形状对位形空间进行分解,将自由空间的连通性用一维曲线的网格表示。
- 加入起始点和目标点后,在该一维无向连通图中寻找一条无碰撞路径。
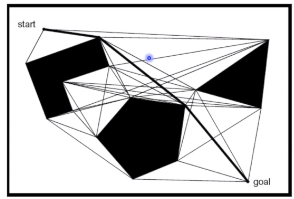
2.可视图法
构建方法
- 找出障碍物的顶点,两两连接,看他们之间是否有障碍物。
- 如果有障碍物,说明不可行。
- 如果没有障碍物,说明是一条可行路径,就将其放入拓扑连通图中,将此顶点作为连通图的顶点。
- 可视图由所有连接可见顶点对的边组成,初始位置和目标位置也作为顶点。
特点
优点
- 简单,环境地图用多边形描述物体时更为方便
- 可得到路径长度长最优的解
缺点
- 所得路径过于靠近障碍物,不够安全
改进
- 以远大于机器人半径的尺寸膨胀障碍物,但容易造成可行路径的消失
- 在路径规划后修改所得路径,使其与障碍物保持一定的距离
3.Voronoi diagram
构建方法
取障碍物之间的中间点,以最大化机器人和障碍物之间的距离
- 对于自由空间的每个点,计算他到最近障碍物的距离;
- 在垂直于二维空间平面的轴上用高度表示该点到障碍物的距离,类似于画直方图;
- 当某个点到两个障碍物或多个障碍物的距离相等时,距离点处出现尖峰,把这些尖峰点连起来就构成了Voronoi diagram。

特点
优点
- 安全性高
缺点
- 计算复杂,路径长度较可视图法长,不适用于短距离的定位传感器
单元分解法
1.基本思想
- 将位形空间的自由空间分为若干的小区域,每个区域作为一个单元
- 以单元为顶点,以单元之间的相邻关系为边构成一张连通图
- 在连通图中寻找包含初始姿态和目标姿态的单元,搜索连接初始单元和目标单元的路径
- 根据所得路径的单元序列生成单元内部的路径
2.精确单元分解
原理
单元边界严格基于环境几何形状分解,所得单元完全空闲
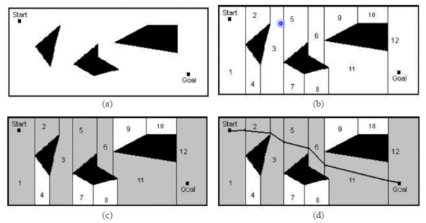
特点
优点
- 机器人无需考虑在每个空闲单元中的具体位置,只需考虑如何从一个单元移动到相邻的空闲单元
- 单元数与环境大小无关
缺点
- 计算效率极大依赖于环境中物体的复杂度
3.近似单元分解
原理
- 栅格表示法:把环境分解成若干个大小相同的栅格
- 用栅格的自由或被占,表示是自由空间还是障碍空间
- 并不是每个单元都完全空闲或完全被占,因此是对实际地图的一种近似
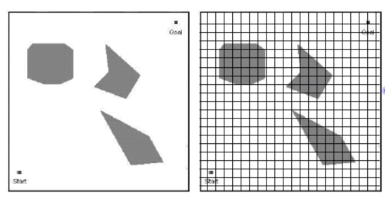
特点
优点
- 非常简单,与环境的疏密和物体形状的复杂度无关
缺点
- 对存储空间要求较大
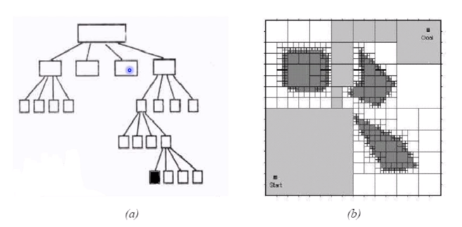
改进
- 四叉树表示法:递归地把环境分为4个大小相等的子区域,直到每个区域中所包含的基本元素全为0或全为1
- 判断相邻单元时较为困难
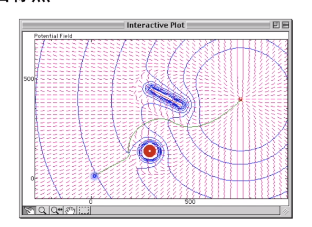
人工势场法(Artificial Potential Field)
基本思想
- 构建虚拟势场,目标点对机器人产生吸引力,障碍物对机器人产生排斥力
- 所有力的合成构成机器人的控制律
1.构建人工势场
目标点的吸引势场:
- 离目标点越近吸引力越小
- $K_a$为系数
- $\mathbf{x}$ 为被评估点
- $\mathbf{x}_d$ 为目标点
- $d_a$ 为距离阈值
障碍物的推斥势场
- 离障碍物越近排斥力越大
- $\rho$为被评估点和障碍点之间的距离
- $\rho_0$为预定义的距离阈值
2.根据势场计算力
- 对势场求偏导数
其中$\mathbf{x}_0$是最近障碍物的坐标向量
3.计算合力
- 计算吸引力和排斥力的合力,进而由力计算得到控制律
- 力的方向就是机器人的运动方向,大小可以对应加速度控制
4.特点
- 机器人是人工势场影响的一个点,沿着势场方向就可以避开障碍物到达目标点
- 所构建的势场构成了机器人的控制律,能够较好地适应目标的变化和环境中的动态障碍物,可以作为实时避障算法
缺点
- 存在局部最小,容易震荡和死锁