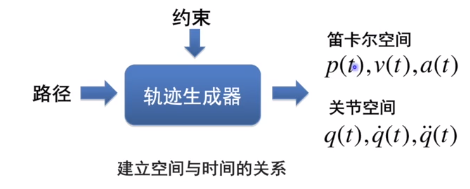
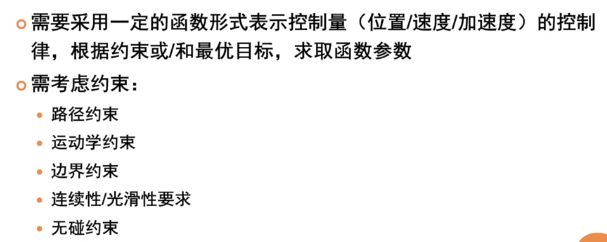
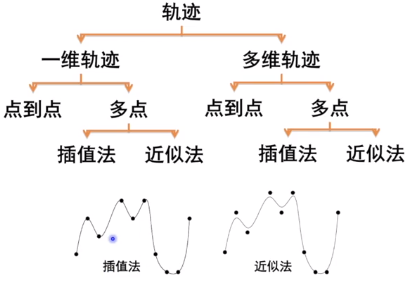
机器人路径规划算法(六)轨迹规划算法综述 Path Planning trajectory planning 2020年 03月27日 目标:给定路径与约束,生成一组控制序列,使机器人从初始位姿移动到目标位姿 移动机器人:得到质心/参考点在笛卡尔空间中的位置、速度和加速度控制序列 关节型机器人: 末端轨迹规划:末端在空间中的位置、速度、加速度控制序列 关节轨迹规划:得到关节空间中的角度、角速度和角加速度控制序列 边界约束 初始状态 终点状态 连续性/光滑性要求 轨迹分类 一维轨迹 多维轨迹 上篇机器人路径规划算法(八)平面轨迹规划算法下篇C++ primer plus(一)综述