PRM(Probabilistic RoadMap)
基本思想
通过随机采样和碰撞检测找到自由位形空间中的路径点和无碰路径,构成连通图
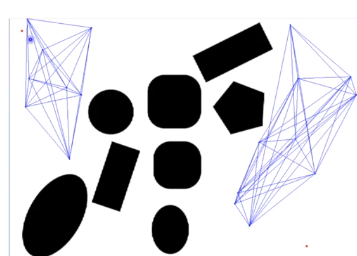
- 在位形空间坐标系中随机取点
- 对采样的点进行碰撞检测,把无碰撞姿态作为图节点
- 每个图节点和其最近相邻的k个节点直线连接,保留无碰路径作为图的边
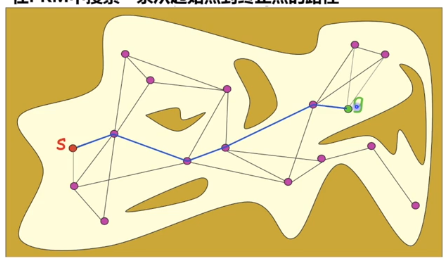
- 加入起始点和终止点构成RoadMap
- 采用基于节点的搜索算法(Dijkstra,A,D)在RoadMap中找到一条代价最小的路径
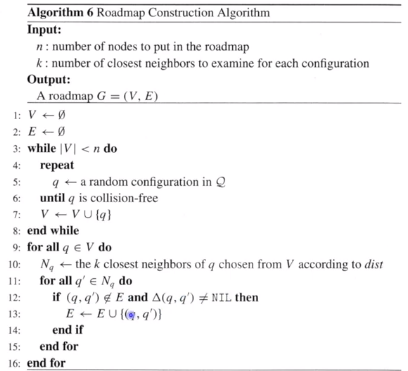
算法的流程图如下
需考虑的几个问题
- 随机位形选择 采用均匀随机采样方式
- 寻找最近邻点 采用KD树方法加速
- 生成局部路径 在一定范围内直接连接图节点
- 检查路径无碰 可以增量式取点或者二分法取点,判断点是否在障碍物区域内
- 进行路径优化
- 从目标点开始依次找它前面的点,检测是否发生碰撞
- 假如未发生碰撞,继续往前寻找,直到路径发生碰撞,将目标点与当前点的上一个点连接
- 从当前点开始继续此优化过程
- 非全联通情况
- 环境复杂,存在狭窄通道等困难场景时,会存在图非联通的情况
- 对节点进行困难度表示,节点一定距离范围内的节点的倒数、该节点到不与该节点联通的最近连通单元距离倒数、局部路径规划失败率
- 以困难度作为该节点被选择为扩张节点的概率
- 选择后,从该节点出发随机选择方向运动,碰到障碍物后再随机选择方向运动,循环若干次直至成功建立与其他联通单元的连接
特点
- 优点
- 简化了对环境的解析计算,可快速得到行车图
- 适用于高维自由位形空间中的规划
- 是近似完备的路径规划
- 缺点
- 对自由空间连通性表达的完整性依赖于采样次数
- 难以评估需要多少时间进行充分采样
- 不考虑机器人的执行可行性
发展趋势
- 将路径规划转为马尔可夫决策问题,采用深度学习/强化学习进行求解。
- 综合考虑与环境中人的交互,学习地图成本,构建成本地图