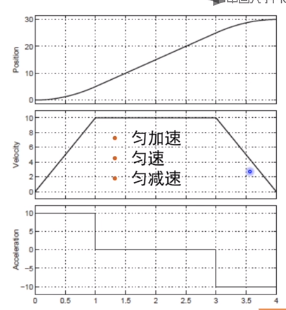
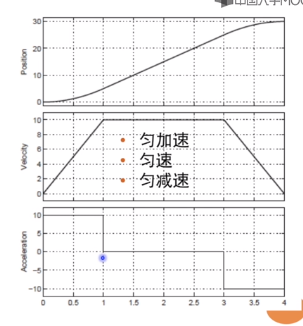
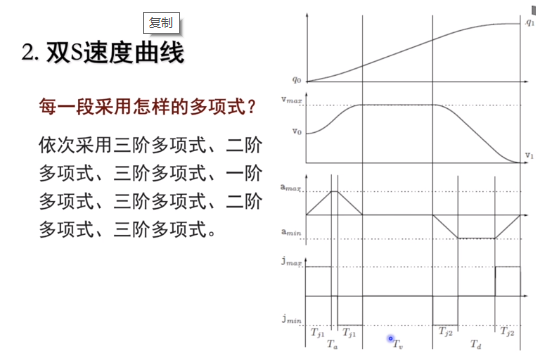
机器人路径规划算法(七)一维轨迹规划算法 Path Planning trajectory planning 2020年 03月27日 表示形式 多项式 三角函数 指数函数 基本一维轨迹 给定初始条件和终止条件,求解多项式各参数即可。 复合一维轨迹 组合多个基本一维轨迹合成 可降低多项式的阶次 可以满足机器人执行能力的约束 可以利用最大化速度或加速度等来实现时间最优 梯形速度轨迹 由两个二阶多项式和一个一阶多项式合成 双S速度曲线 上篇机器人路径规划算法(四)PRM系列下篇机器人路径规划算法(九)融合导航规划算法